

Door: Wolfgang Ebbers
Hoe classificeren we gerobotiseerd klantcontact met burgers?
We zijn getuige van de opkomst van een vierde generatie van kanalen voor overheidsdienstverlening, waarin robots zich mengen in het contact met burgers en zich op termijn kunnen voordoen als ambtenaren. Wat gaat dit betekenen voor de bestaande overheidsdienstverlening? De hoogste tijd dat we meer inzicht en grip krijgen op deze ontwikkeling. Wij nemen u in drie stappen mee in onze zoektocht naar een classificatie van gerobotiseerd klantcontact met burgers.
Stap 1: over welke robots hebben we het?
We hebben het niet over de Terminator of Robocop als ambtenaar van de toekomst. Om uit te leggen over welke robots we het wel hebben, beginnen we eerst bij de classificatie van robots zoals die werd gemaakt door Brainbridge, Hart, Kim en Scassellati (2008). Zij maakten verschil tussen fysieke robots enerzijds en virtuele robots anderzijds. Vervolgens focussen we op een specifieke klasse van robots: de sociale robot. Daarbinnen zijn twee typen te onderscheiden.
- De robot waarbij we de sociale interactie tussen de robots benadrukken.
- De robot waarbij we de sociale interactie met mensen benadrukken.
Om te begrijpen wat de gevolgen zijn voor de inzet van robots voor andere kanalen, leggen we onze focus op deze tweede soort sociale robots. Als wij het over robots hebben, spreken we het in het geval van kanalen en overheidsdienstverlening over:
“sociale robots waarbij de nadruk ligt op interactie met burgers, die zowel een virtuele als een fysieke verschijningsvorm kunnen aannemen.”
Stap 2: welke klassen laten zich daarbinnen onderscheiden?
Daarop voortbouwend, onderscheiden we de volgende drie klassen:
- Software agents. Dit zijn robots die alleen in virtuele, softwarematige, vorm bestaan. Daaronder vallen chat bots, die de nadruk leggen op tekst en schrift. Conversatie robots die de nadruk leggen op het gesproken woord en zo een alternatief voor het telefoongesprek met een ambtenaar vormen. Tot slot intelligente agents, die chat en conversatie met elkaar kunnen integreren en andere software gestuurde handelingen kunnen doen, waaronder Apple’s Siri en Google’s Assistant.
- Virtueel werkelijke of virtuele werkelijkheid versterkende robots. Sleutelkenmerk is dat deze klasse visuele output genereert. Daaronder vallen enerzijds augmented reality, waarmee ze bijvoorbeeld tijdens conversaties additionele informatie tonen. Anderzijds gaat het om virtual reality, waarmee ze persoonlijke ontmoetingen of persoonlijk contact simuleren, zoals bijvoorbeeld met de zogenaamde onbemande 3D aangiftestations van de politie.
- Fysieke robots, waarbij we onderscheid maken tussen humanoïde (ook wel androïde) en non-humanoïde verschijningvormen. Bijvoorbeeld Sony’s gewezen robohond Aibo, verschillende robokonijntjes of de ‘social humanoïd robot’ Sophia.
Deze indeling beschrijft het landschap voor nu en de nabije toekomst. Hoe ziet dat landschap er over vijf jaar uit? Door alle nieuwe ontwikkelingen zullen we deze indeling regelmatig moeten bijstellen.
Stap 3: welke kanaaleigenschappen wijzen we aan die klassen toe?
We maken hiervoor gebruik van eigenschappen zoals we ze in ons werk al vaker hebben gebruikt voor het duiden van kanalen:
- Gebruikskenmerken zoals snelheid, interactiviteit, of gebruikersgemak [tabel 2]. Wat dat laatste betreft is de ene robot gebruiksvriendelijker te trainen dan de andere. Sommige AI gedreven robots begrijpen je meteen en leren snel bij van alle input. Andere robots doen er langer over.
- De ‘mogelijkheid tot reduceren van complexiteit’. De mate van complexiteit van een dienst hangt af van het aantal onderling gerelateerde handelingen dat een burger moet verrichten om een taak succesvol uit te kunnen voeren. Denk aan de aanvraag van een paspoort of aan het aanvragen van bijzondere bijstand in een schuldsaneringssituatie. Het laatste is veel complexer dan het eerste.
- De ‘mogelijkheid tot reduceren van ambiguïteit. De mate van ambiguïteit hangt vervolgens sterk af van de persoon zelf. Hoe duidelijk of onduidelijk ervaart iemand de handelingen die hij moet uitvoeren? De ene ZZP-er vindt zijn belastingaangifte appeltje-eitje. De ander heeft moeite om uit te zoeken welke aftrekposten hij wel of niet mag gebruiken en vraagt hulp aan een boekhouder of accountant.
Is de mate van complexiteit en ambiguïteit relevant? Wij vinden zeer zeker van wel, omdat ze vaak samenhangen met de kanaalkeuze. Hoe hoger de complexiteit en de ambiguïteit, hoe groter de kans dat een burger kiest voor een zogenaamd rijk kanaal. En dat brengt ons bij een volgende eigenschap: - De rijkheid van kanalen. Rijke kanalen kennen hoge snelheid en interactiviteit. Maar ze kennen vooral ook een rijke set aan stimuli, ook wel communicatieve vaardigheden. Denk hierbij dit aan het afgeven, zien en interpreteren van non-verbale signalen, aan personalisatie, aan de mogelijkheid om snel te variëren in taalniveau. Precies die eigenschappen, waarvan wij vinden dat sociale robots er in hoge mate over kunnen beschikken.
Bovenstaande klassen en karakteristieken brengt ons bij de onderstaande tabel, die we met collegae onderzoekers uit Denemarken hebben ingevuld. Daarbij zijn we uitgegaan van de huidige stand van de techniek. Tegelijk willen we hiermee aanduiden in hoeverre een klasse van robots in staat is om een bestaand kanaal aan te vullen en wellicht op termijn te vervangen.
Tabel 2: kanaaleigenschappen van sociale robots
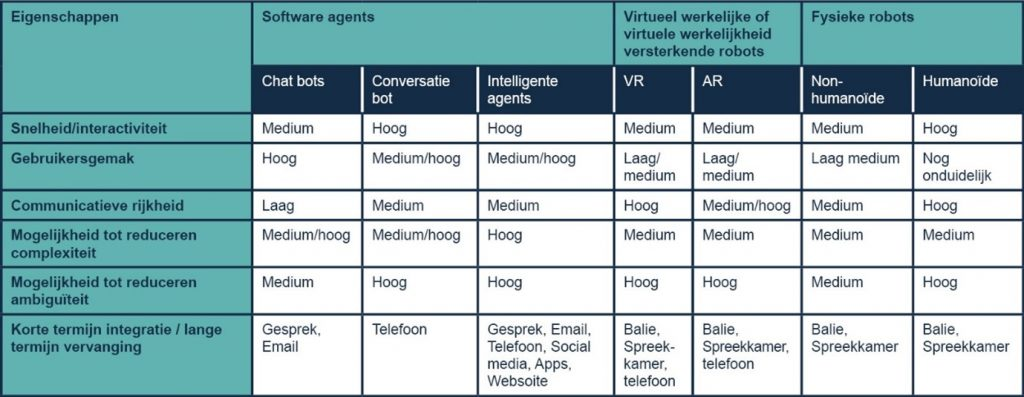
Bezint eer men begint. Alleen al om de kosten en inspanningen die gemoeid zijn met deze nieuwe technologie, is het goed om te bezinnen eer u begint. Met deze tabel krijgt u een antwoord op:
- Wat zijn voor het klantcontact de relevante kanaaleigenschappen van robots?
- Wat betekent dat voor de integratiemogelijkheden met andere kanalen?
- Hoe kunnen we op langere termijn de dienstverlening vormgeven?
Wat valt er af te dingen op de classificatie van de kanaaleigenschappen van de verschillende sociale robots hierboven (tabel 2).
Ten eerste is de classificatie door slechts een handvol experts uitgevoerd. De vraag is of andere experts het op dezelfde manier zouden doen. Dat laatste heeft te maken met de voortschrijdende ontwikkelingen. AI wordt steeds krachtiger en de humanisering van robots gaat steeds sneller. Dit heeft invloed op de eigenschappen, maar bovenal op ons derde en laatste punt. Het verschilt niet alleen per expert, maar ook per daadwerkelijke gebruiker. Verschillende doelgroepen van gebruikers zullen verschillende percepties hebben van de kanaaleigenschappen. Hoe? Dat is voor ons nog niet duidelijk. In ieder geval is de huidige classificatie niet toekomstbestendig en willen we daar een verandering in aanbrengen.
Hoe toekomstbestendig is uw klantcontact met burgers?
Bent u een overheidsorganisaties en wilt u meer inzicht in de toekomst van uw klantcontact met burgers binnen uw organisatie? Wij zijn bezig met een onderzoek naar de vervolmaking van een toekomstbestendige classificatie van gerobotiseerd klantcontact met burgers. Hiervoor zoeken wij praktijkcases.
Meer informatie of aanmelden? Neem contact met ons op: Wolfgang Ebbers
Deze bijdrage is gebaseerd op een eerder wetenschappelijk artikel van onze hand, namelijk: Pieterson, W. J., Ebbers, W. E., & Madsen, C. O. (2017). New channels, new possibilities: A typology and classification of social robots and their role in multi-channel public service delivery. In M. Janssen, K. Axelsson, O. Glassey, B. Klievink, R. Krimmer, I. Lindgren, P. Parycek, H. J. Scholl, … D. Trutnev (Eds.), Electronic Government: 16th IFIP WG 8.5 International Conference, EGOV 2017 (pp. 47-59). (Lecture Notes in Computer Science; Vol. 10428). Cham: Springer.